Overview
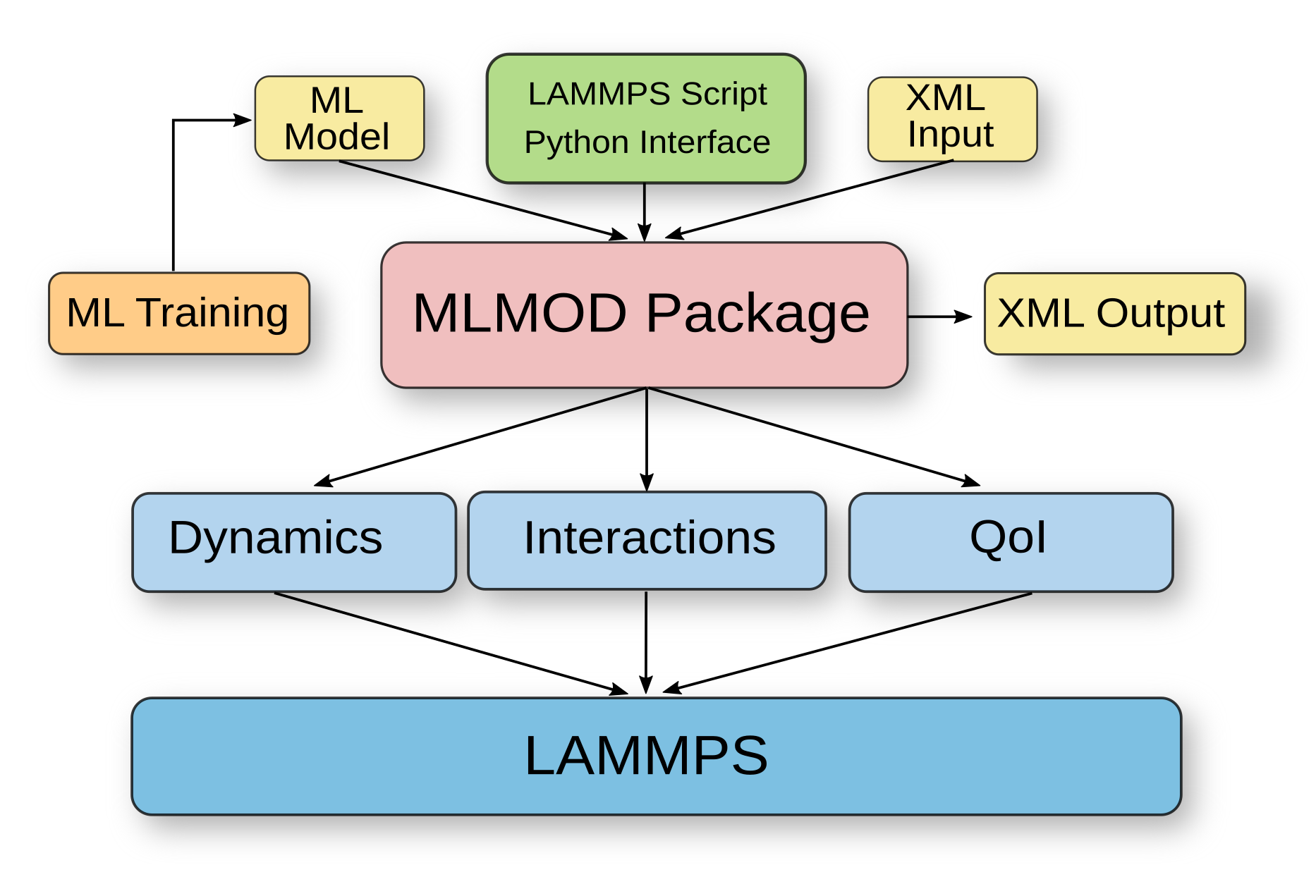
MLMOD is a Python/C++ package for utilizing machine learning methods and data-driven modeling for simulations in LAMMPS. The package provides methods for time-step integrators for dynamics and interactions using general ML model classes, including Neural Networks, Kernel Regression, and others. Models can be trained and exported from PyTorch or from other machine learning frameworks. Note, this is an early prototype alpha release with future implementations and features to come. Please provide feedback or information on bugs using the forms below.
LAMMPS is an optimized molecular dynamics package in C/C++ providing many interaction potentials and analysis tools for modeling and simulation. Interaction methods include particle-mesh electrostatics, common coarse-grained potentials, many-body interactions, and others.
Below is a summary of the mlmod methods available for interfacing the
machine learning approaches with simulations.
Name |
Tag / Mode |
Role |
Description |
MPI |
|---|---|---|---|---|
General ML Force-Laws |
F_ML1 |
force |
General force law for groups of particles \(X=\{X_i\}_{i\in\mathcal{G}}\) based on a specified machine learning model, \(F(X,V,F,I_T,t)\). |
|
General ML Dynamics |
Dyn_ML1 |
dynamics |
General dynamics based on specified machine learning model, \([X^{n+1},V^{n+1}] = \Gamma[X^n,V^n]\). |
|
Quantity-of-Interest ML Methods |
QoI_ML1 |
quantity of interest |
For computing a Quantity-of-Interest (QoI) as defined by a specified machine learning model, \(A(X,V,F,I_T,t)\). Available for use in subsequent calculations within simulations. |
|
General Mobility ML Model |
dX_MF_ML1 |
dynamics |
Mobility based on specified machine learning model, \({dX}/{dt} = M(X)F\). |
|
Pairwise Mobility ML Model |
dX_MF_Q1_ML1_Pair |
dynamics |
Mobility with pairwise-structure and specified machine learning model, \({dX}/{dt} = M(X)F + F_{thm}\). |
|
Collective N-to-N Mobility ML Model |
dX_MF_Q1_ML1_N2N |
dynamics |
Mobility with general structure and specified machine learning model, \({dX}/{dt} = M(X)F + F_{thm}\). |
|
Mobility Test |
dX_MF |
dynamics |
For testing mobility calculations, \({dX}/{dt} = M(X)F\). |
|
Particle ML Force-Laws |
F_X_ML1 |
force |
Force law for individual particles \(X_i\) based on specified machine learning model, \(F_i(X_i,V_i,F_i,{I_T}_i,t)\). |
yes |
Pairwise ML Force-Law |
F_Pair_ML1 |
force |
Force law for pairs of particles based on specified machine learning model, \(F_{ij}(X_{ij},V_{ij},\) \(F_{ij},{I_T}_{ij},t)\). |
Now available with Jupyter notebooks and Python scripts for readily setting up models and simulations, see the examples folder.
When using this package, please cite: